
概要
OWL で取得した森林マップ情報(森林資源データ)を元に施業計画を行い、 GPS の精度が低い又は GPS を受信できない 森林内でも立木の位置関係を元に、 AR (拡張現実)技術を用いて、施業対象木まで迅速にナビゲーションするシステム
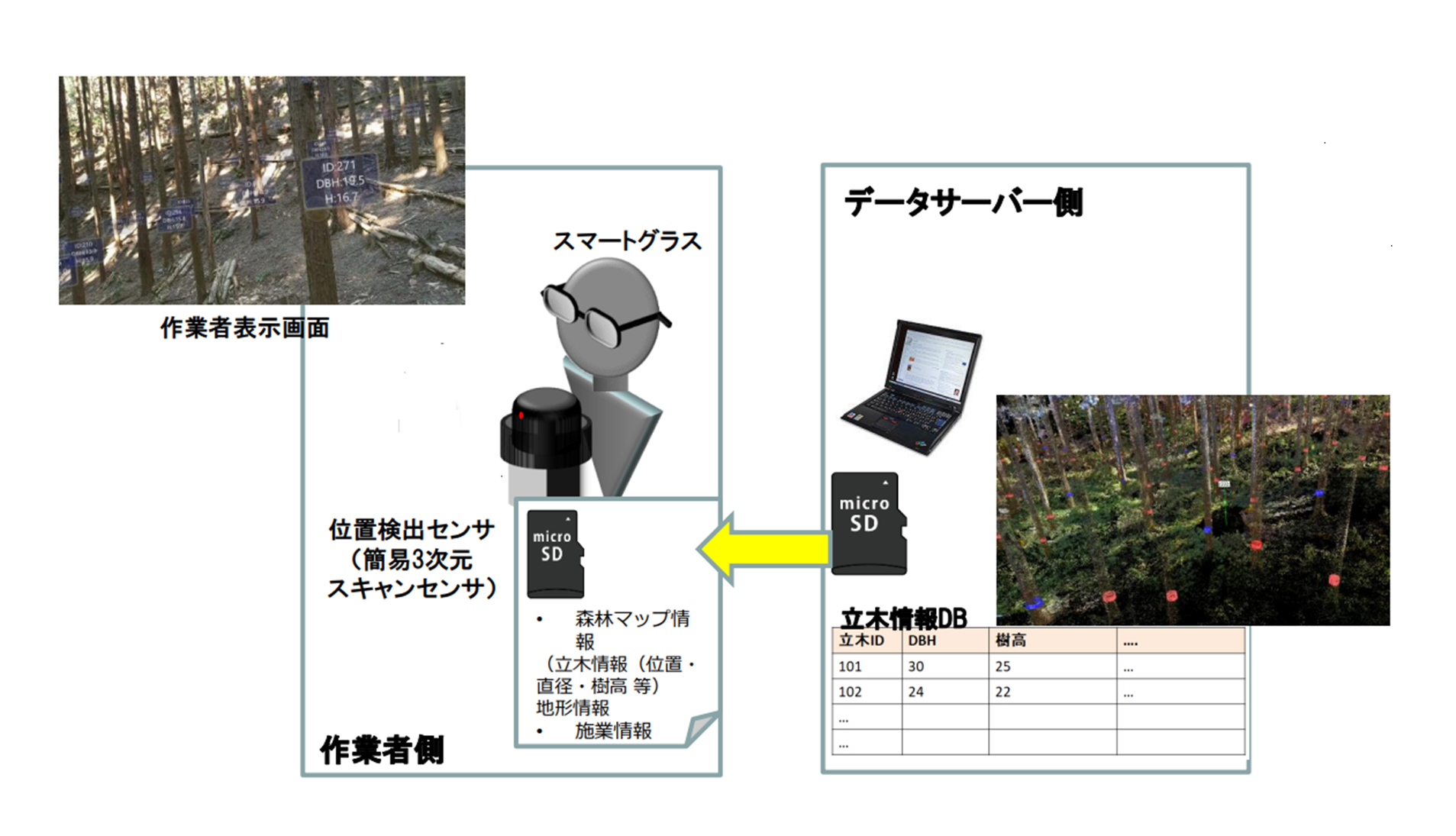
構成
OWLで計測した森林マップ情報を読込み、位置検出センサによって現在位置を算出、スマートグラスに各種情報を表示する
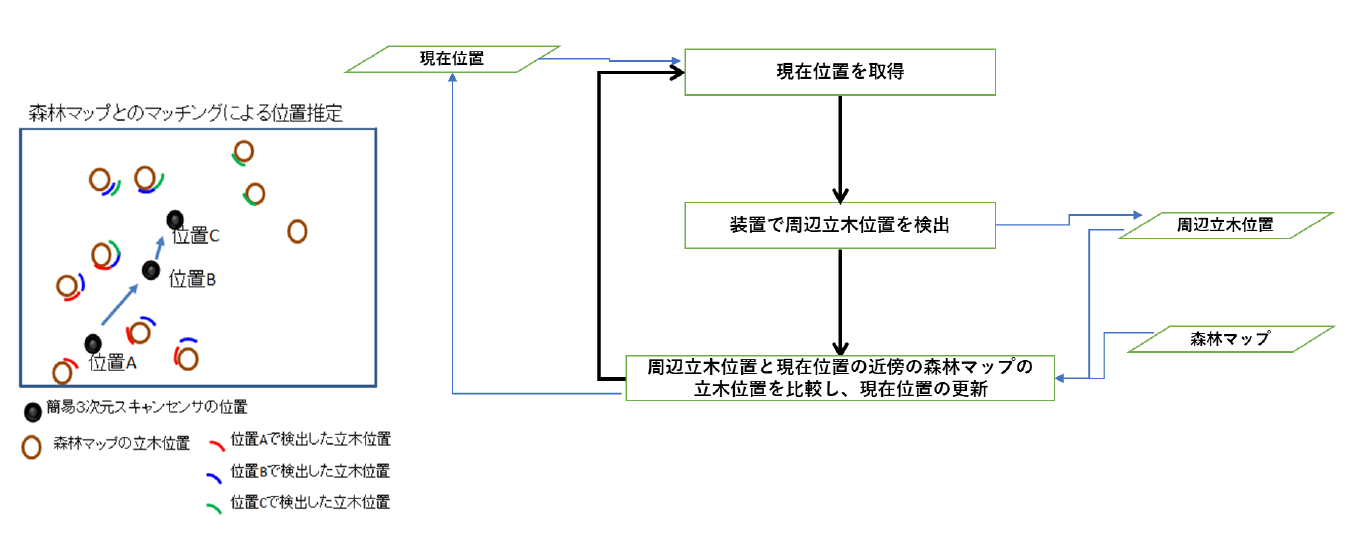
現在位置の取得・更新
位置検出センサーと森林マップ情報をもちいて、現在位置を取得・更新していく
立木情報のAR表示
スマートグラスに立木ID、胸高直径(DBH)、樹高(H)を表示する

ルート検索とARナビゲーション
立木までの最適経路(急傾斜の場所を避けたルート)をAR表示し、ナビケーションする
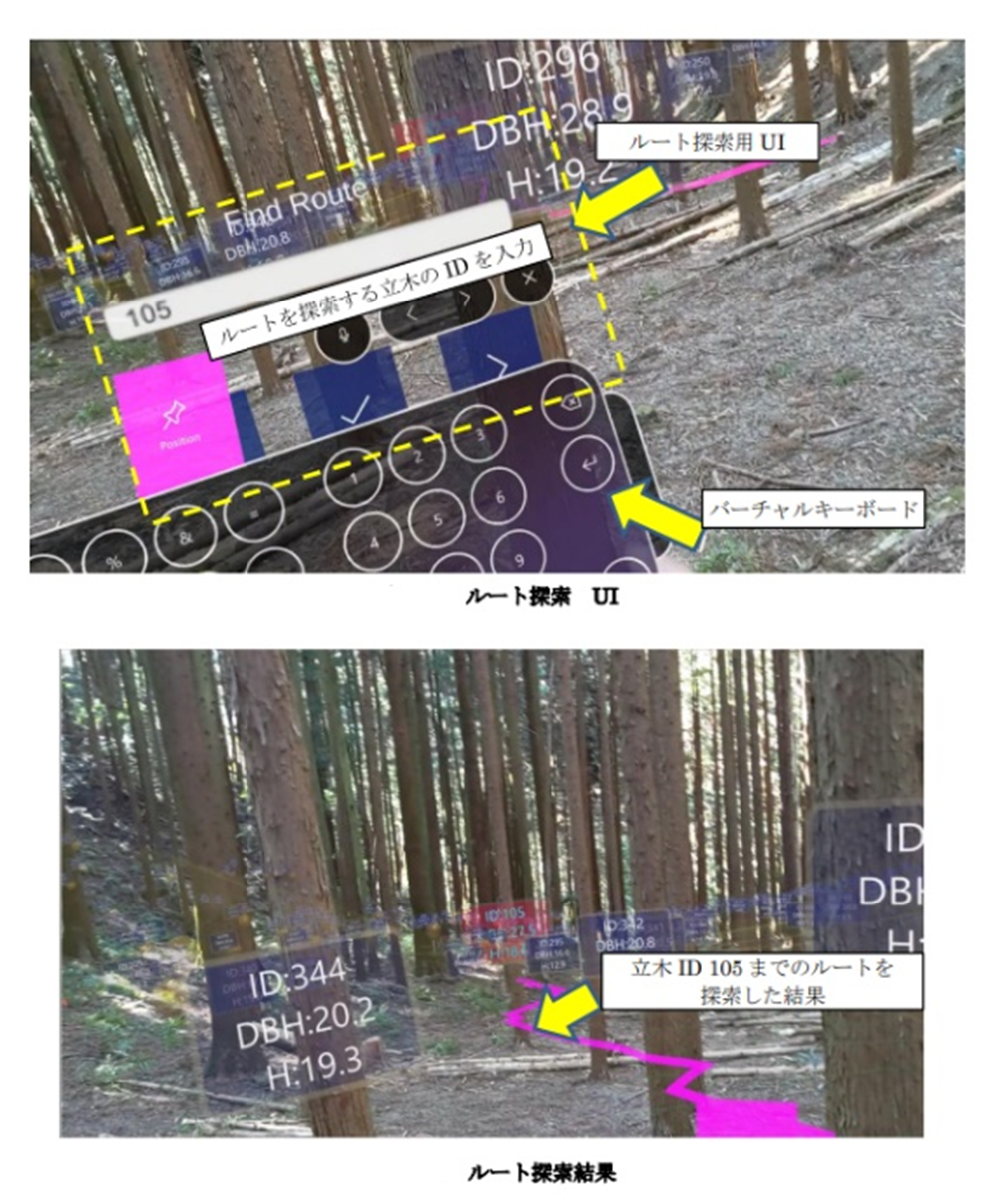
動作イメージ
ルート検索とARナビゲーションの動作イメージ
パンフレット
- OWL ARナビゲーションシステム [PDF]