
OWLを使った林内計測の概要
レーザスキャナとスキャンについて
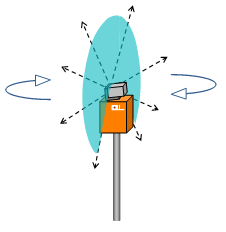
レーザスキャナは下方90°を除いた270°の範囲を円周上にレーザを照射しています。このレーザスキャナを水平に180°回転させることにより3次元的に(ドーム状に)空間をスキャンします(スキャンする=レーザを照射する)。
スキャンする地点は周囲の状況を確認しなるべく多くの立木にレーザが照射される場所を選ぶようにします(レーザは物体を透過しないためOWL計測装置から「見えない」立木は検出することができません)。
スキャンする場所を決めたら専用一脚を最大に伸ばしスキャンボタンを押下します。ボタンを押下すると22.5秒かけてスキャンし終了すると自動でレーザスキャナが原点位置に戻ります。
これを繰り返して林内を計測します。
OWLの持ち方

一脚を両手で持ち、計測中は揺らさないように注意します。レーザを遮らないように頭は下げてください。一脚を鎖骨付近に載せるようにするとより安定します。
近くに人がいる場合は人を立木と誤認識してしまう可能性がありますので、背を低くして立木から離れて待機するようにしてください。
スキャン間隔
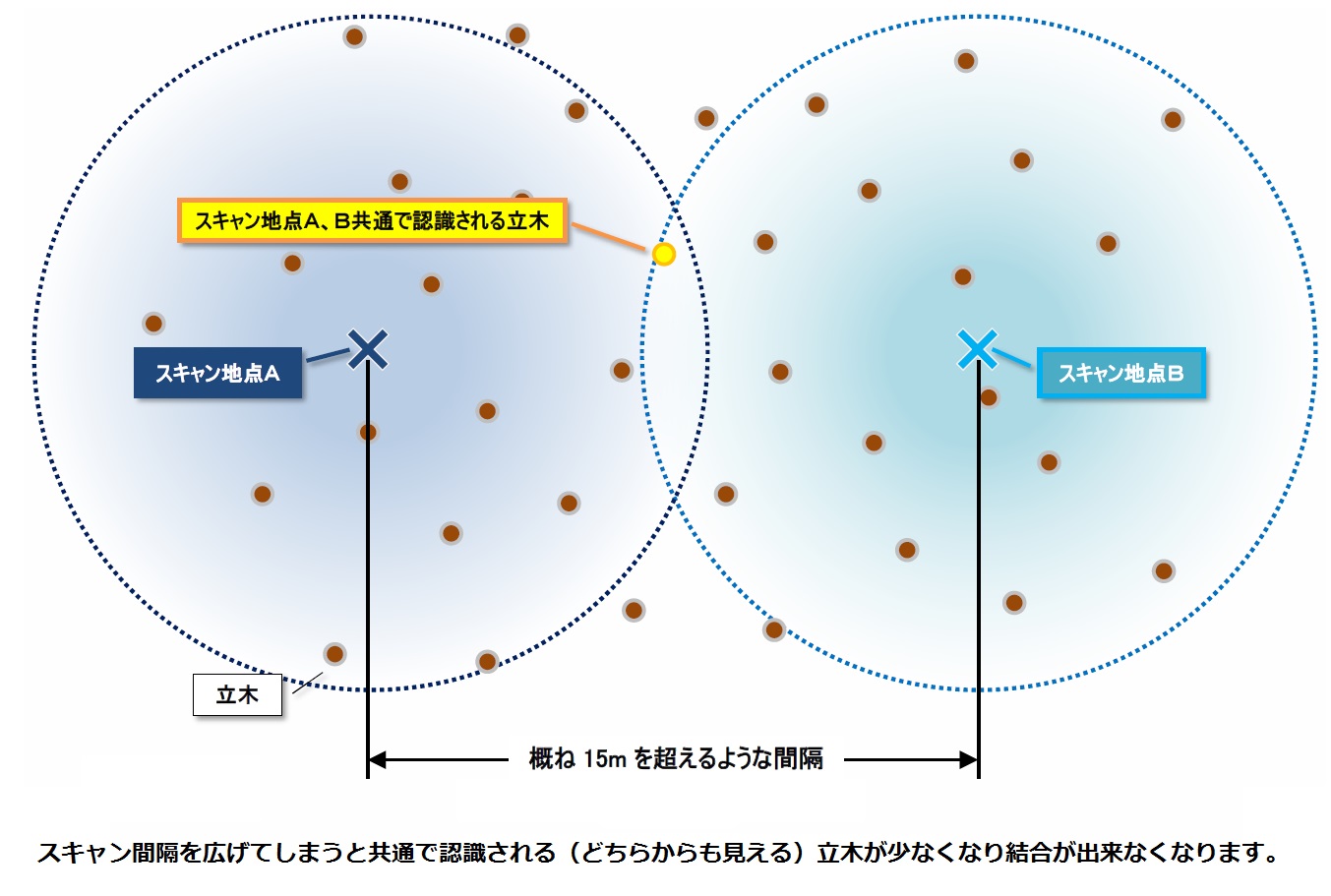
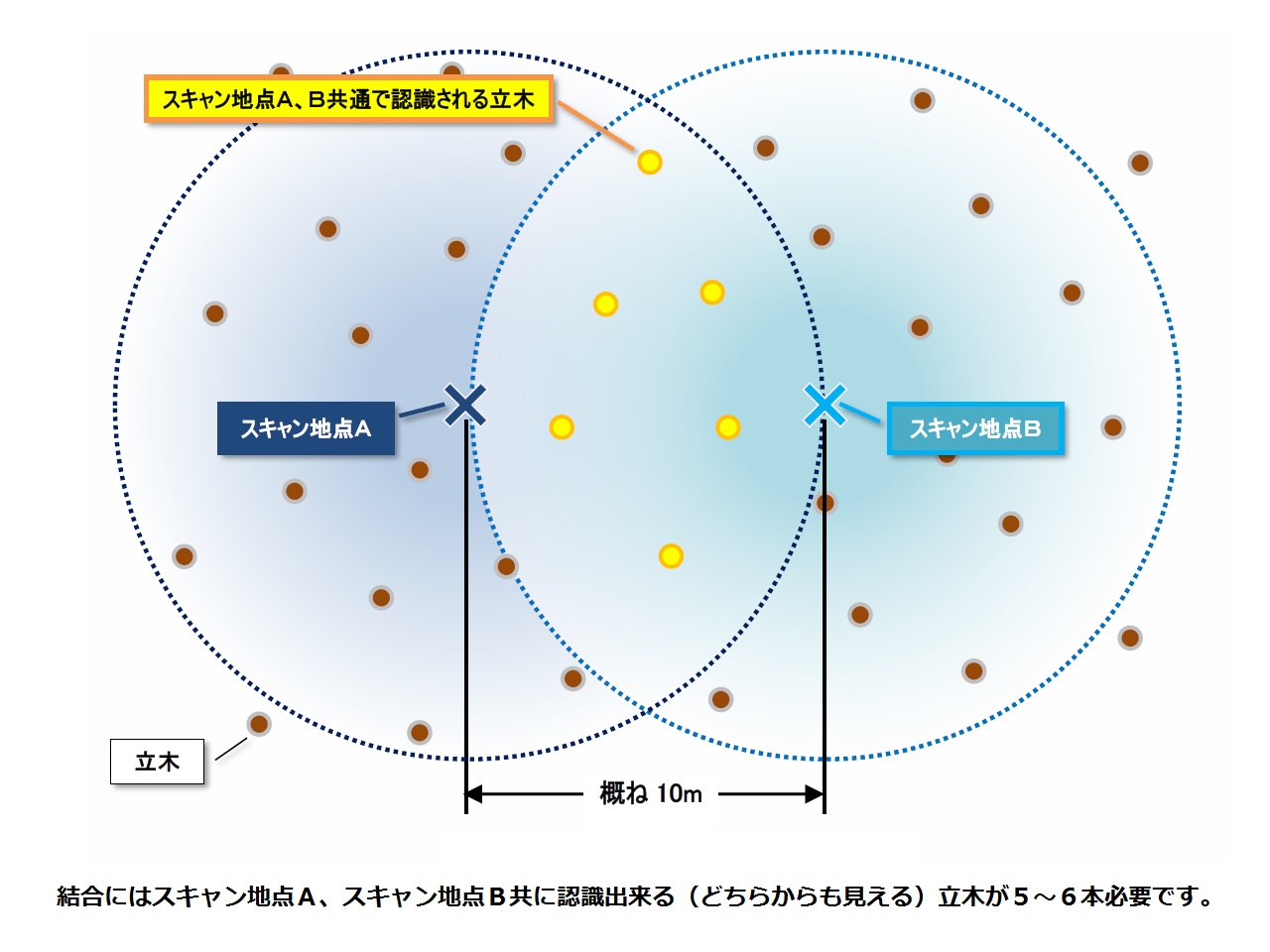
スキャン間隔は約10mを推奨しています。
レーザの到達距離は30mですが、30m先にある立木が検出される距離ではありません。立木として認識される距離は概ね15mです。また、空間結合処理の関係上スキャン地点の距離を広げてしまうと空間結合ができなくなるリスクが高まります。このためスキャン地点の間隔は約10mとしています。
スキャンの順番
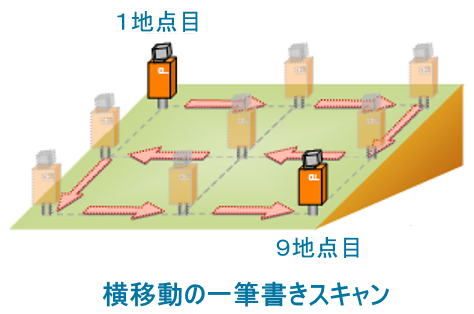
現地にてどのような順番でスキャンを行っても構いませんが、解析処理の都合と現地にて最低限の労力で計測を済ませるために、右図のように一筆書きでスキャンを行うようにします。
(2025/03/05 追記)
OWLManager Ver2.3~ では枝分かれ結合機能が実装されています。本機能により、解析処理では一筆書きでのスキャンとする必要はなく、枝分かれのような結合順での調査データ作成が可能となりました。
正しい計測結果が得られない可能性のある立木
ここで示す立木は胸高直径の算出が正しく行われない可能性のある立木です。

(太く算出される傾向にある)

(太く算出される傾向にある)

(太く算出される傾向にある)

(太く算出される傾向にある)

(レーザの照射状況により2本や3本に検出される)